|
小径・大減速比 遊星歯車機構
< アイデア内容 > 互いに噛み合う一対のピニオンのうち一方がサンギアと、もう一方がリングギアと噛み合う”ダブルピニオン式”の遊星歯車機構ですが、 軸方向の噛み合い位置を、図の A,B,Cの3段階にずらすことによって、サンギアと第2ピニオンおよびリングギアと第1ピニオンとが径方向で重なり合うことを可能としているので、 サンギアとリングギアの歯数をピニオンの歯数とは無関係に選択することができます。 遊星キャリアを入力としたときの減速比は、 出力ギアの歯数÷(リングギアの歯数-サンギアの歯数) となり、出力がリングギアなら同回転方向、サンギアであれば逆回転となります。 複数のピニオン対を周上に等分配置するときの噛み合い条件は、ピニオン対の数を”N”とすると、「 サンギアとリングギアの歯数差 」が”N”の倍数となるようにします。 |
|
|
< メリット > ・ 「 サンギアとリングギアの歯数差 」を小さくすることで、正転/逆転の両方向で大きな増減速比を得ることができる。 ・ 普通の遊星歯車機構で減速比を大きくしようとすると、サンギアを小さくして遊星ギアを大きくするため、機構全体の外径は、(小X1+大X2) となるが、本機構では第1ピニオンを小さくすると、(大X1+小X2) となり、更に外側にリングギアが無いので、外径を小さくするのに有利である。
・ 普通の遊星歯車機構で、遊星ギアを歯数の違う2つを同心に組み合わせた2段式にして大減速比を得る方法もあるが、周上複数の噛み合い条件を満たすためには2つのギアの歯形位相を正確に合わせる必要があり生産性が悪い。
・ 「 サンギアとリングギアの歯数差 」を決めてしまえば、サンギアまたはリングギアの歯数は1歯ごとに選択でき、速比設定の自由度が高い。 ・ 更に、第2ピニオンに内接して噛み合う第2サンギアを追加することで、簡単に複合遊星歯車機構を構成して、より大きな減速比を得ることができる。 |
|
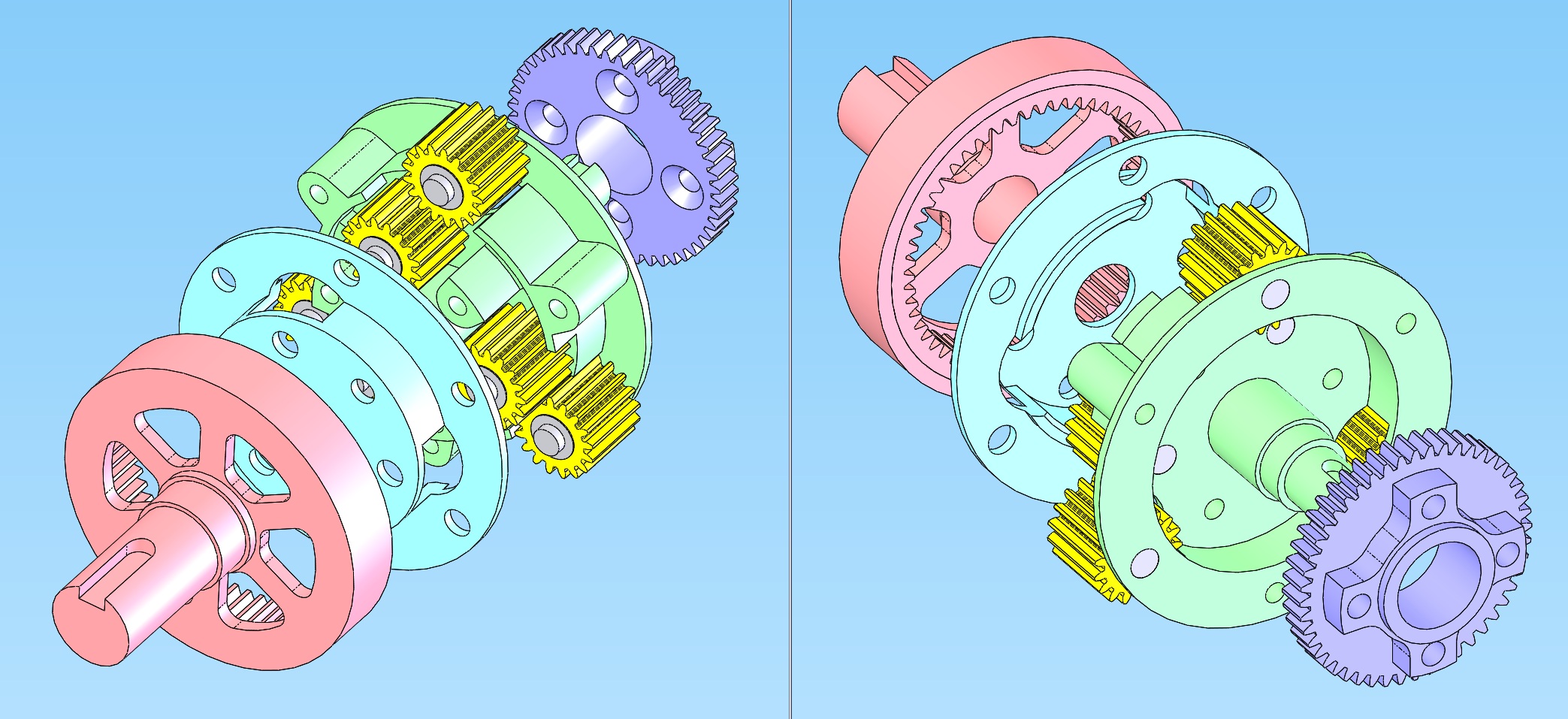
< 具体的な構造の一例 >
下の画像は、具体的な部品構造のスタディモデルです。 |
|
|
< 特許出願済み > 出願番号 : 特願2016-097856 |